
As robots move into increasingly dynamic real-world environments, reliable 3D perception becomes essential for safe navigation and interaction.
That’s exactly what Proximity Robotics set out to solve with its perception platform, pxPerception. The team is developing LiDAR-first perception systems for applications such as pallet handling, truck loading, and mobile manipulation — areas where traditional camera-based systems can struggle with lighting changes, dust, motion blur, and limited range.
To build a more robust solution, Proximity Robotics partnered with Seyond to combine high-performance LiDAR hardware with close engineering collaboration for real-world robotics applications.
Why Proximity Robotics Chose LiDAR-First Perception
To create a more reliable perception system, Proximity Robotics needed sensor technology that could deliver stable and detailed environmental data in real time. That led the team to Seyond.
According to Proximity Robotics, Seyond’s image-grade point cloud quality was one of the key reasons for selecting the solution. It enables camera-like spatial perception capabilities while maintaining the robustness advantages of LiDAR. Combined with pxPerception’s CUDA-accelerated point cloud processing, Seyond LiDAR data can be used for real-time 3D scene understanding, object tracking, and robotic navigation.
The team also highlighted Seyond’s industrial-grade hardware reliability, robotics-friendly sensor designs, and the close cooperation provided by Seyond’s application engineering team throughout development. For Proximity Robotics, one of the most exciting aspects of the project is enabling robots to perceive the 3D world with high spatial resolution and minimal latency — a critical requirement for real-world autonomous operation.


Three LiDARs, Three Robotics Applications
One of the most unique parts of the collaboration is how Proximity Robotics uses different Seyond LiDAR sensors across multiple robotics applications, with each sensor supporting a different operational need.
Smart Infrastructure with Falcon K
For large warehouse and logistics environments, Proximity Robotics explored using Seyond Falcon K as a shared infrastructure sensor mounted above the workspace. Instead of equipping every vehicle with a full sensor stack, a single Falcon K can provide a high-resolution view of the surrounding environment, helping track robots, forklifts, and assets in real time. This approach simplifies deployment while avoiding many of the limitations of camera-based systems, such as lighting dependency and privacy concerns.
Real-Time Navigation with Robin W
For autonomous navigation and 3D perception, Proximity Robotics uses Seyond Robin W together with its pxPerception platform. The solution helps robots understand their surroundings in real time for applications like pallet handling and autonomous truck loading. By combining high-resolution point cloud data with low-latency processing, the system enables reliable navigation and scene understanding even in dynamic industrial environments.
Smarter Pallet Handling with Hummingbird D1R
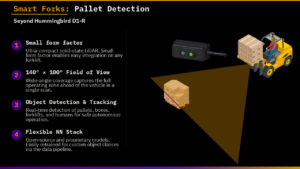
For robotic forklifts and mobile manipulation, compact sensor design becomes critical. Seyond Hummingbird D1R is small enough to be mounted directly onto forklift forks, allowing robots to maintain a clear view of the operating area even in tight or dark spaces such as trailers. This flexibility helps improve perception reliability during pallet handling and other close-range robotics tasks.
More Than Hardware: Engineering Collaboration That Accelerated Development
For Proximity Robotics, the partnership with Seyond went beyond selecting a LiDAR sensor.
As development progressed, the two teams worked closely together to optimize the solution for robotics applications. Seyond engineers supported sensor integration, perception workflows, and simulation development to help the customer validate and improve performance more efficiently.
One of the biggest challenges in robotics AI is generating enough high-quality training and validation data. Collecting and labeling real-world 3D point cloud data can be time-consuming and expensive.
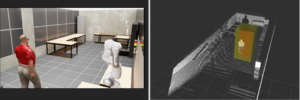
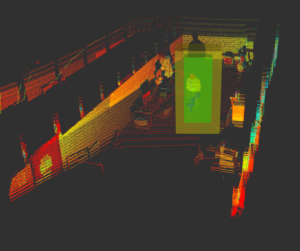
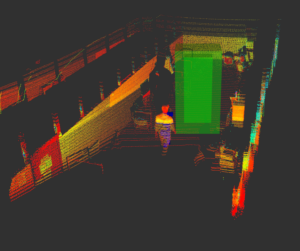
To help solve this challenge, Proximity Robotics and Seyond collaborated on a NVIDIA Sensor RTX simulation model for Seyond LiDAR. This allowed the team to generate synthetic LiDAR data for training and testing while accelerating development cycles.
Building the Future of Autonomous Robotics
Today, Proximity Robotics is validating pxPerception in live intralogistics applications including autonomous truck loading and pallet handling. By combining Seyond LiDAR with GPU-accelerated perception, the team is building systems capable of reliable navigation, object tracking, and real-time scene understanding in complex industrial environments.
For Proximity Robotics, the collaboration with Seyond represents more than a sensor integration. From infrastructure monitoring to autonomous navigation and smart pallet handling, the project demonstrates how high-performance LiDAR and close engineering support can help accelerate the next generation of autonomous robotics.